Как прошить по can шине
Lada Kalina wagon «Черепашка-ниндзя» › Logbook › Подключаем CAN к ММС 2190, прошиваем CAN в ММС 2190


На выходных добрался до ММС, подключил ее к OBD. Для подключения есть специальные шнуры которые втыкаются в OBD разъем, а на другой стороне втыкаются в колодку ММС.
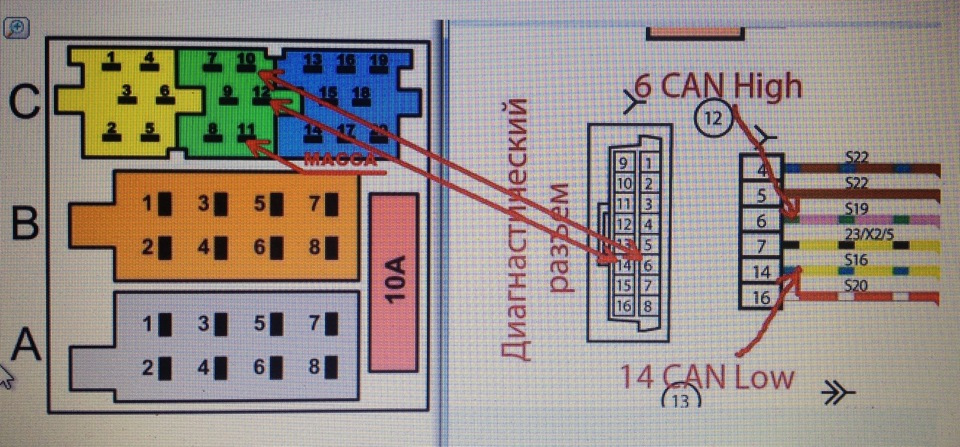
Так как колодка OBD у меня занята Мультитрониксом TC 750 то я просто прикрутил контакты к проводам, на другой стороне взял обычные маленькие разъемы одел в термоусадку и подключил к ММС. Подключаем ММС 10 к 6 на OBD и ММС 12 к 14 на OBD, 11 провод масса он не нужен его можно не подключать.
Для того чтобы примотаться к проводам OBD рекомендую снять вещевой ящичек, там всего надо открутить 8 винтов, но работать будет гораздо удобней.

Подключил проверил все работает и показывает.
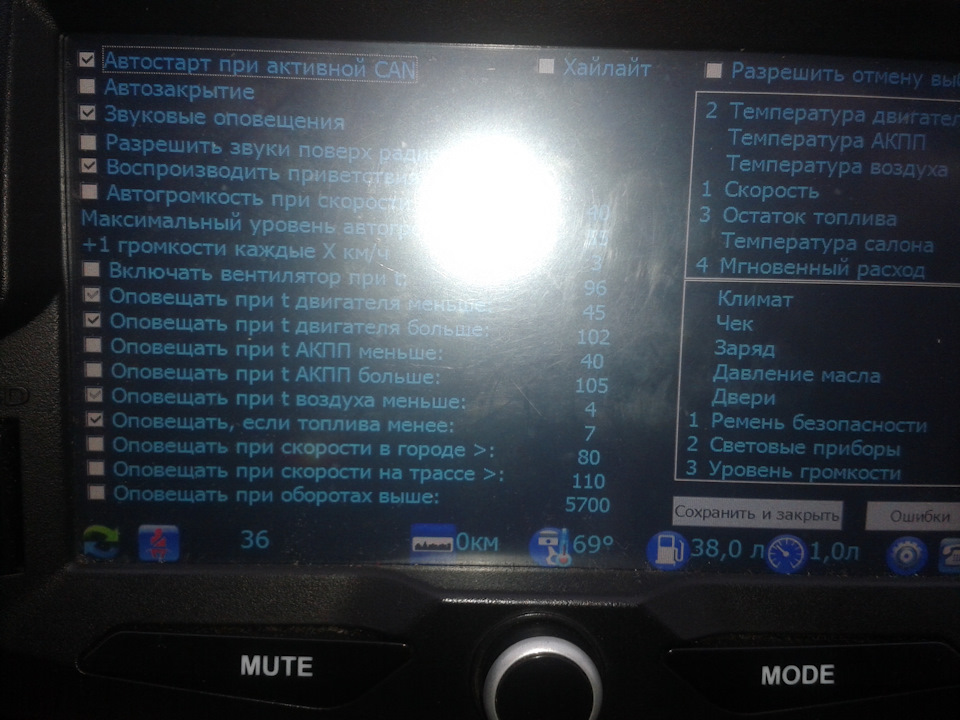
Вернее почти все у меня старая прошивка 1,7, поэтому функционал урезан.
1) Заходим СЮДА и выкачиваем именно ту прошивку, исходя что мы хотим от жизни.
Я выкачал 1.11
2 Распаковываем папку osfiles и кладем ее sdmmcosfiles если вы по кладете содержимое папки osfiles в корень (распотрошите, как это делается при прошивки ММС), или в какое то другое место покладете, то получите такую ошибку: стандартный файл S19 не найден MMS_CAN_bootloader.s19
3 Глушим машину, выключаем свет, закрываем двери ждем секунд 30 чтоб Can шина уснула.
4 Выходим на рабочий стол, больше ни каких программ на ММС запущено быть не должно лучше вообще перегрузить ММС.
5 Нажимаем exeшник sdmmcosfilesUPPwriter.exe (ЕЩЕ РАЗ ПРОВЕРТИ ЧТО ПУТЬ СОВПАДАЕТ)
6 Ждём окончания прошивки в это время нельзя заводить машину, открывать двери, включать свет, запускать приложения на ММС, ставить снимать с сигнализаций . Сидим тихо и не отсвечиваем .
7 После окончания прошивки проверяем


Хотелось бы сразу отметить если у Вас нет каких то блоков то не стоит ждать чуда индикация не появиться.
Например у меня комплектация Стандарт у меня нет блока контроля электроники, поэтому у меня нет индикаций поворотников и света ближнего и дальнего, у меня не показывает температуру в салоне и за бортом у меня нет климата, а также не показывает температуру масла в коробке так как у меня механика. Да и вообще основная причина подключения диагностического провода лично для меня, что пишутся данные в журнал о пройденом расстоянии за день и время, мне это нужно для заполнения путевых листов, плюс эти данные легко скинуть на SD карту или USB, они сохраняются в экселевском файле.
После подключения проводов и обнавленийи CAN нажал на проверку ошибок и он мне выдал кучу ошибок, странно но почему то мой ботовой компьютер об них умолчал, они сидели где то глубоко. правда расшифровку этих ошибок я найти не сумел, какие то странные ошибки.
Источник: www.drive2.com
Еще раз о диагностике CAN-шины
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2 , 5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:

Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.


На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
 Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:

Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1 );
- CAN communication circuit 2 (Коммуникационная цепь CAN 2 );
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :

А это – блоки цепи CAN 2 . Как видно, связи с ними попросту нет:

Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2 .
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1 , а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1 , а на контакты 12 и 13 – провода CAN 2 .
Снимаем осциллограмму в цепи CAN 1 . Она имеет прямо-таки академический вид:

Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2 , 26 В, на проводе CAN Low – 2 , 25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3 , 58 В, на проводе CAN Low – 1 , 41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13 , чтобы получить осциллограмму сигнала CAN 2 . Вот она:

Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:

Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :

Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:

Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0 , 2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
Источник: chiptuner.ru
Преобразователь шины интерфейса CAN на USB
Данный проект предназначен для изготовления простого устройства для мониторинга шины CAN. Я выбрал микропроцессор NUC140LC1CN 32K Cortex-M0 по одной главной причине – он имеет периферийные блоки USB и CAN.
Характеристики проекта
- Простота разработки
- Совместимость с протоколом LAWICEL CANUSB
- Мониторинговое устройство отображается как USB FTDI устройство
- Поддержка 11-битных CAN 2.0A и 29-битных CAN 2.0B кадров
- Наличие внутреннего буфера сообщений FIFO CAN
- Питание от USB порта
- Загрузчик, хранимый в памяти USB запоминающего устройства, для обновлений микропрограммы
- Микропрограмма, которая доступна для загрузки
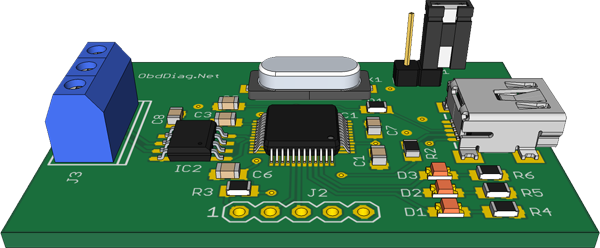
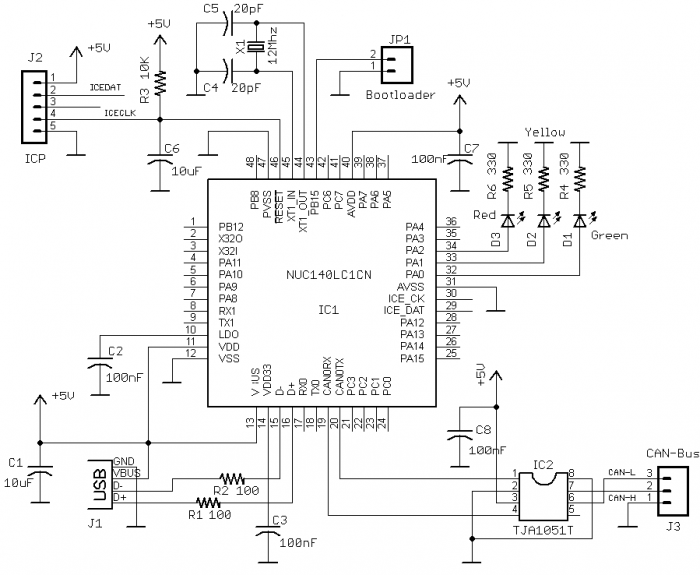
Схемное решение
Для разрешения периферийному блоку NUC140 CAN соединяться с шиной CAN необходимо наличие приемопередатчика CAN. Для этой цели наиболее пригодна микросхема TJA1051T от компании NXP. Блок NUC140 может работать от источника питания напряжением 5В. Поэтому нет необходимости для применения дополнительного стабилизатора напряжение на 3.3В. Это позволяет значительно упростить задачу реализации интерфейса шины CAN. В схеме предусмотрено три светодиодных индикатора состояния:
- D1 – индикатор состояния USB соединения с хостом
- D2 отображает активность шины CAN
- D3 отображает ошибки интерфейса CAN
NUC140 не имеет встроенного загрузчика и единственным способом его запрограммировать — использовать интерфейс ARM Serial Wire Debug (SWD) (J2 коннектор) и программатор Nuvoton ICP. Ну и естественно, если загрузчик уже заранее запрограммирован, то его можно активировать. Для этой цели необходимо использовать джампер JP1. Использование джампера JP1 перед подачей питания на интерфейс приведет к запуску загрузчика.
Загрузчик
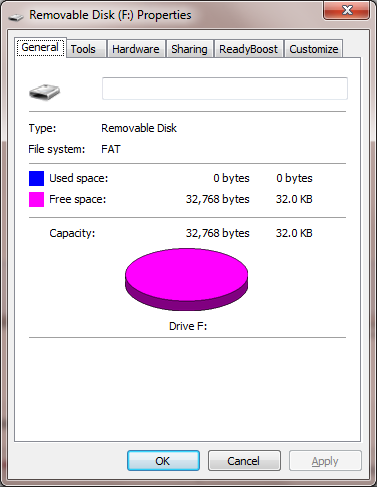
Флэш-память NUC140LC1 разделена на две секции. Одна из них предназначена для выполнения кода пользовательской программы (APROM) размером 32K, а другая для загрузчика (LDROM). Размер LDROM только 4K, что делает проблематичным создание полностью функционального USB загрузчика. Я использовал загрузчик, размещенный на запоминающемся устройстве (MSD), предоставленный Nuvoton. Установка джампера JP1 запускает выполнение загрузчика. В результате съемный диск будет отображаться в файловой системе хоста размером 32 кБ. Просто скопируйте и вставьте или перетащите и опустите обновление микропрограммы CAN-USB на диск загрузчика. Отсоедините USB кабель, снимите джампер и подсоедините кабель снова. Теперь должна выполняться обновленная микропрограмма.
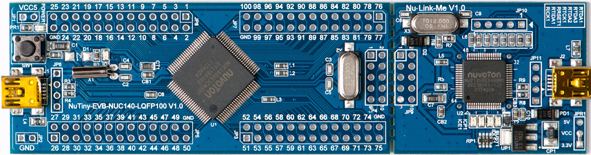
Программирование интерфейса CAN-USB и NuTiny-SDK-140
Для программирования процессора NUC140 потребуется программатор Nu-Link от Nuvoton и программное приложение Nuvoton ICP. Но вместо него я решил использовать демонстрационную плату NUC140 (NuTiny-SDK-140), доступную от Digi-Key. Она имеет две части, часть с микросхемой NUC140 и собственно программатор Nu-Link. Плата равномерно перфорирована, что позволяет отсоединить часть Nu-Link. На самом деле вы может изготовить данное устройство исключительно на демонстрационной плате NuTiny-SDK-140, добавив только дополнительную микросхему приемопередатчика CAN.
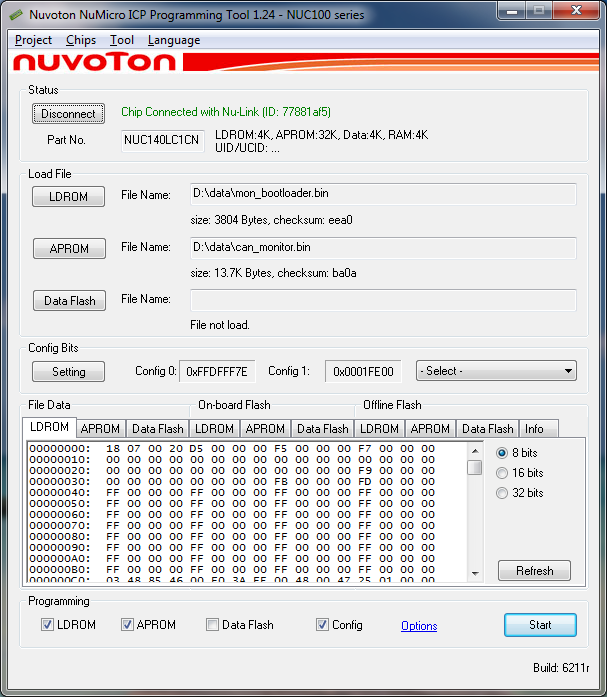
При подсоединении Nu-Link процесс программирования NUC140 становится несложным. Ключевым вопросом является выбор загрузки из LDROM вместо APROM (в Config настройках) для обеспечения функционирования USB загрузчика.
Программное обеспечение
Интерфейс CAN-USB совместим с протоколом LAWICEL CANUSB и будет работать с приложениями, предназначенными для данного протокола. Я протестировал два приложения с интерфейсом CAN-USB:
CANHacker V2.00.02
Это бесплатное приложение CANHacker. Я не смог найти руководство пользователя для этого приложения. Однако оно достаточно простое и интуитивное при использовании.
Источник: cxem.net
Как прошить ММС Lada Vesta с помощью SD-карты
Штатная сенсорная мультимедийная система (ММС) на Лада Веста (артикул 8450007950) имеет большой функционал (чтение аудио/видео файлов, USB, Bluetooth, Hands free, навигация и др.). Для расширения ее возможностей (например, для активации динамических линий камеры заднего вида) программное обеспечение может быть обновлено. Для этого можно обратиться к официальному дилеру или прошить магнитолу Весты своими руками.
Внимание! Все действия с магнитолой вы делаете на свой страх и риск. Автор ответственности не несет.
Скачать прошивки
Версии прошивок ПО ММС:
| Версия прошивки | Сборка | Примечание |
|---|---|---|
| 27.0.0.4106 | ||
| 27.0.0.4110 | ||
| 27.0.0.4111 | ||
| 27.0.0.4112 | ||
| 27.0.0.4113 | ||
| 27.0.0.4114 | Заводская | |
| 27.0.0.4114 | Исправлены ошибки в работе камеры заднего вида, улучшена работа Bluetooth | |
| 27.0.0.4118 | Навител не работает | |
| 27.0.0.4119 | Заводская | Навител не работает , появились динамические линии камеры. Обновлять с версии 4114. |
| 27.0.0.4120 | Заводская | . |
| 27.0.0.4120 | Доработанная | без CAN, синяя тема оформления и новая заставка ( видео ). |
Версии прошивок CAN:
Прошивка CAN — это прошивка контроллера, который подключен с одной стороны к CAN-шине, с другой к COM порту главного процессора ММС. Прошивка CAN независима от прошивки ММС.
В версии 27.0.0.4119 CAN 1.19 появились динамические линии. Старые статичные линии тоже останутся, чтобы их убрать следует заменить камеру.

Пример работы прошивки 27.0.0.4119 (было обновление с 27.0.0.4114) на видео:
Все файлы были позаимствованы с форума 4pda.ru
Инструкция по обновлению системного ПО ММС
Потребуется: SD-карта с файловой системой FAT32 (со стандартным размером кластера).
- Разархивировать прошивку в корень SD-карты и вставить ее в магнитолу (ОММН).
- Включить ОММН
- Нажать кнопку стрелка «1»
- В открывшемся меню последовательно нажать в 4-х точках, указанных стрелками, отступив от края окна около 5 мм
- В открывшемся меню нажать кнопку «SOFTWARE»
- В открывшемся меню нажать кнопку «SW UPGRADE»
- В открывшемся меню нажать кнопку «UPGRADE»
- В открывшемся меню выбрать: Update Radio, Update Navi, Update OS (при прошивке 27.0.0.4119 нужно выбрать все пункты).
- Затем нажать кнопку «ОК»
Запустится процесс обновления. За время обновления ОММН несколько раз перезагрузится. Пожалуйста, дождитесь завершения обновления!
Не отключайте питание ОММН, не выключайте зажигание автомобиля и не нажимайте кнопки во время обновления. После завершения обновления, нажмите кнопку «ОК».








Другие популярные темы:
Ключевые слова: магнитола лада веста
Источник: xn--80aal0a.xn--80asehdb
Прошивка кан шины ммс 2190


В первый же день ручки зачесались, курил группу vk.com/ladammc
В группе я думаю можно найти все, а если не найдете, люди добрые обязательно помогут, мне очень помог админ Алексей Волобоев, ему за это большое спасибо.
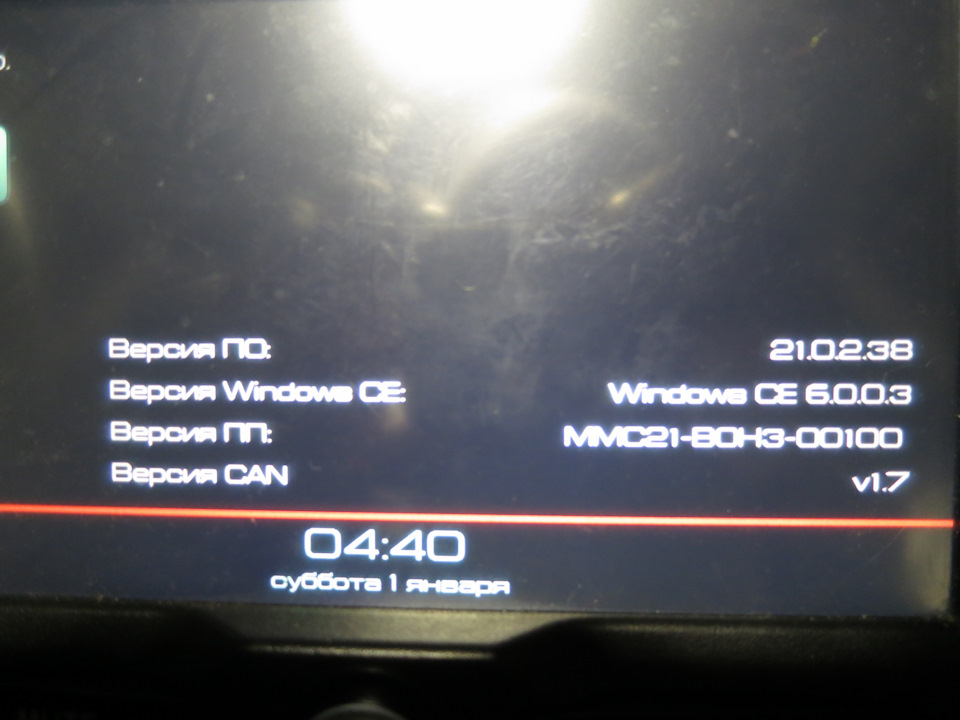
Версия ПО на этикетке магнитолы 2.0.2.32 stock
— полностью стоковый вариант ПО (совместимость с другими ПО неизвестна)
Прошита Магнитола была прошивкой для приор/калин 23.0.2.38
Поставил 21.0.2.38.
Затем прошил Can модуль ммс версией 1.10
Потом установил альтернативное меню Newmenu 8.4.8.
Получалось не с первого раза все, инструкции и прошивки брал из группы, меню выбрал на обум, теперь уже хочу поставить singlemenu, из-за множества скинов, но думаю чуть по пойзже.
Колодки для подключения саба/камеры/кан шины у меня не было. В городе в Товарах Прикамья нашел по отдельности mini iso — 898р, для камеры 1290р, для кан шины нет. Думаю пошли вы нахер со своими ценами. Купил на авито Mini iso за 250р, + две пустые колодки зелёная и синия.
Тонкой проволокой достал кое-как один pin, сьездил в магазин, купил «мелкие pinы», один большой pin для камеры, термоусадку, 3 метра провода, и 2 штекера для obd2. Вышло все на 133р.
Сделать решил по простому — Бомжо Can)
На провод с одной стороны присабачил клемму для ммс, с другой стороны штекер для obd2. Первый провод: клемму ммс подключаем в 10 контакт зеленой колодки, штекер obd в 6 контакт.
Второй провод: клемму ммс в К12, клемму obd К14.
Теперь можно смотреть и сбрасывать ошибки, показывает :мгновенный расход, стоимость поездки, скорость, обороты, количество топлива и много чего еще, можно выставить обороты ХХ, включение карлсона на 95гр итд
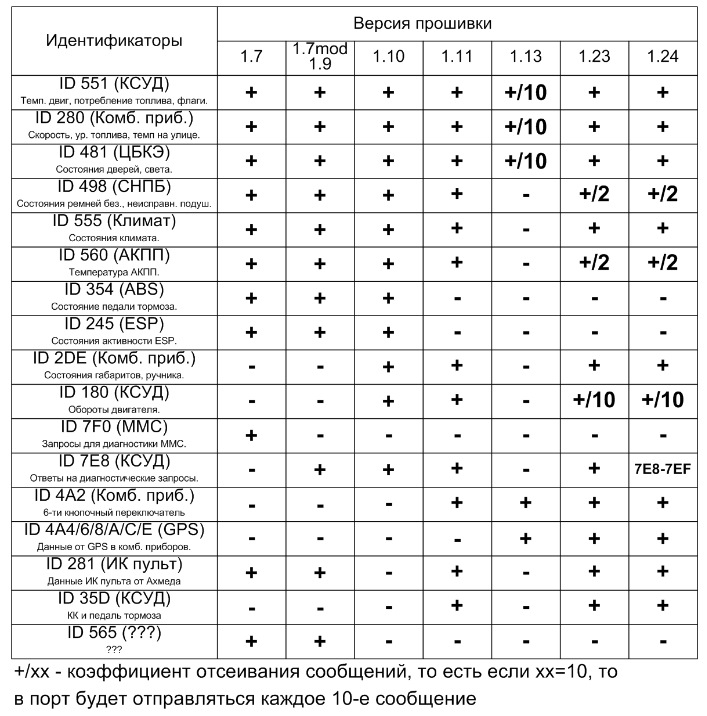
Описание разновидностей прошивок.

Версии 1.7 и 1.13 стоковые.
Встроенная в автомобиль навигация работает только на 1.13, 1.23 и 1.24.
1.9, 1.10, 1.11 сделаны на основе 1.7;
1.23 сделана на основе 1.13.
В 1.7 есть только 11 ID, которые могут быть перенаправлены в COM-порт, никаких делителей и т.п. нет и добавить их ооочень сложно. В 1.13 есть группа ID (3 шт. 481, 551, 280) с делителями, группа ID без делителей (4Ax) и группа ID (8 шт.) без делителей отключенных в прошивке. Также с некоторых ID информация забирается и обрабатывается внутри контроллера CAN. Однако как ее можно получить мне не известно.
В 1.24 (измененная 1.23) удалось сделать прием ID с маской, то есть выделить диапазон принимаемых ID. Сделал это с диапазоном 7E8..7EF для приема диагностических запросов от всех контроллеров в наших авто.
ID 4A2 только у комбинаций со встроенным GPS и только с подключенным 6-ти кнопочным подрулевым переключателем.
У каждой версии есть свои плюсы и минусы:
Версии на основе 1.7:
+ Хорошо перепрошивается даже с заведенным мотором.
— Захлебывается передача данных (если часто отсылать в CAN-контроллер данные, то они перестают отправляться в шину).
— Мало ID.
Версии на основе 1.13:
+ Не захлебывается передача данных.
+ Много ID.
+ Есть делители (очень помогает снизить нагрузку, т.к. ID:180 сообщения идут 100 раз в сек.)
— Перепрошивка очень чувствительна к активности шины и др. (были случаи окирпичивания).
Описание процесса прошивки CAN модуля.
- Качаем нужную вам версию прошивки.
- Распаковываем папку osfiles в корень карты памяти (SD). C USB не шьётся!
- Выйти на рабочий стол ММС. Перед прошивкой никакие другие программы не запускать. То есть, закрыть альтменю или другие приложения использующие CAN шину и соответственно COM3.
- Проводником запустить sdmmcosfilesUPPwriter.exe
- Ждём окончания процесса прошивки. Вначале секунд 20 ничего не будет происходить на экране, потом начнётся процесс прошивки. ММС не выключать! Хотя у некоторых процесс не запускался пока не сделали ВЫКЛ->ВКЛ ( Не перезагрузка! ).
- По окончании можем закрыть всё что мешает и вновь запустить альтменю. Перезагрузка не требуется, но и плохого в этом ничего не будет.
Прошивки.
Восстановление CAN при помощи USBDM.
В архиве инструкция и файлы. Проверено на ММС гранты.
Если Калина, RESET, BKGD и GND искать на боковом сервисном разъеме, VDD возможно рядом с контролером CAN.

2) Просто распаковываем архив и скидываем на SD все содержимое.Должно выглядеть так:
sdmmc osfiles Start
EndCalib.JPG
S19FileDecoder.dll
UPPwriter.exe,
MMS_CAN_bootloader.s19
3) С SD сесть в машину,вставит SD закрыть все двери,багажник,выключить фары вообщем все выключить и закрыть.Выходим на рабочий стол заходим в SD в папку Osfiles там запускаем UPPwriter.
4)Начинается программирования в этот момент ни придаем никаких признаков жизни, Ничего не трогаем наблюдаем за процессом .(Двери не открывать,фары не включать и т.п)
5)Завершения.Теперь смело заходите в NM и тестируете. Чтения ошибок работает только на переходной NM 8.1
Источник: kalina-2.ru