Как устроена can шина
Современный автомобиль, к сожалению или к счастью — решать Вам, уже не тот ящик на колесах, с полутора десятками проводов, в котором мог разобраться мало-мальски грамотный человек, и даже починить, если что-то сломалось…
Компания AxessAuto оказывает услуги по установке мультимедийных навигационных систем для Вашего автомобиля с гарантией https://axessauto.ru/multimedia-i-navigaciya/
Подробная консультация по тел.: +7 (921) 778-33-78
Современный автомобиль — это уже компьютер на колесах, хотите ли Вы этого или нет… И даже если Вы и не подозреваете об этом, то только по причине того, что занимаются ремонтом Вашего автомобиля профессионалы. Именно они и должны выполнять все работы на Вашем авто. Соответственно и установку дополнительного оборудования лучше доверить специалистам.
Часто при обсуждении вопросов дополнительной охраны автомобиля приходится «читать лекции» клиентам, объясняя, иногда очень долго, почему на их автомобиль сигнализация должна ставиться не 1 час, а как минимум 10 часов, а иногда и полтора — два дня. И часто в этих разговорах приходится упоминать такое словосочетание как «Кан шина», что частенько вводит в ступор клиентов.
Так что же это такое — КАН ШИНА?
И для чего она в автомобиле?
Сначала ответ на вопрос — для чего?:
Как сэкономить медь?:
Подсчитано, что за последние пять лет число опций в автомобиле, являющихся в большинстве своем потребителями электрической энергии, увеличилось вдвое. И произошло это вовсе не по прихоти автопроизводителей, а благодаря растущим потребностям покупателей в комфорте и законодательным требованиям к безопасности и охране окружающей среды
Все бы ничего, но возможности электрооборудования не безграничны. И если раньше конструкторы решали вопросы, в основном связанные с увеличением надежности, то сейчас приходится думать над созданием принципиально новых схем, которые либо изменят традиционную «архитектуру» электрики, либо позволят ей приспособиться к поступи научно-технического прогресса.
Шины не для колес:
Использующаяся до сих пор однопроводная схема подразумевает, что отрицательные выводы всех потребителей электроэнергии соединяются с «массой» — кузовом и другими металлическими частями автомобиля, которые выступают в роли второго, минусового провода. Однако когда общая длина реальных проводов, подключенных от потребителей к плюсу генератора, достигла полукилометра, а их вес приблизился к центнеру, выяснилось, что однопроводная схема не столь уж и хороша, какой казалось прежде.
Поэтому появилась мультиплексная проводка, а с ней — шина CAN (от Controller Area Network), которую при традиционном сохранении минуса на «массе» применяют вместо «растолстевших» жгутов старой схемы на современных моделях машин, насыщенных электроприводами и электронными блоками.
Далее неплохая статья объясняющая принципы конфигурирования и управления всеми устройствами в современном автомобиле:
Бортовая электроника современного автомобиля в своем составе имеет большое количество исполнительных и управляющих устройств. К ним относятся всевозможные датчики, контроллеры и т.д.
Для обмена информацией между ними требовалась надежная коммуникационная сеть.
В середине 80-х годов прошлого столетия компанией BOSCH была предложена новая концепция сетевого интерфейса CAN (Controller Area Network).
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). Собственно шины представляет собой витую пару. Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля. По такой шине обеспечивается достаточно высокая скорость передачи данных.
Как правило, провода CAN-шины оранжевого цвета, иногда они отличаются различными цветными полосами (CAN-High — черная, CAN-Low — оранжево-коричневая).
Благодаря применению данной системы из состава электрической схемы автомобиля высвободилось определенное количество проводников, которые обеспечивали связь, например, по протоколу KWP 2000 между контроллером системы управления двигателем и штатной сигнализацией, диагностическим оборудованием и т.д.
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при этом скорость передачи информации между блоками управления (двигатель — трансмиссия, ABS — система безопасности) составляет 500 кбит/с (быстрый канал), а скорость передачи информации системы «Комфорт» (блок управления подушками безопасности, блоками управления в дверях автомобиля и т.д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
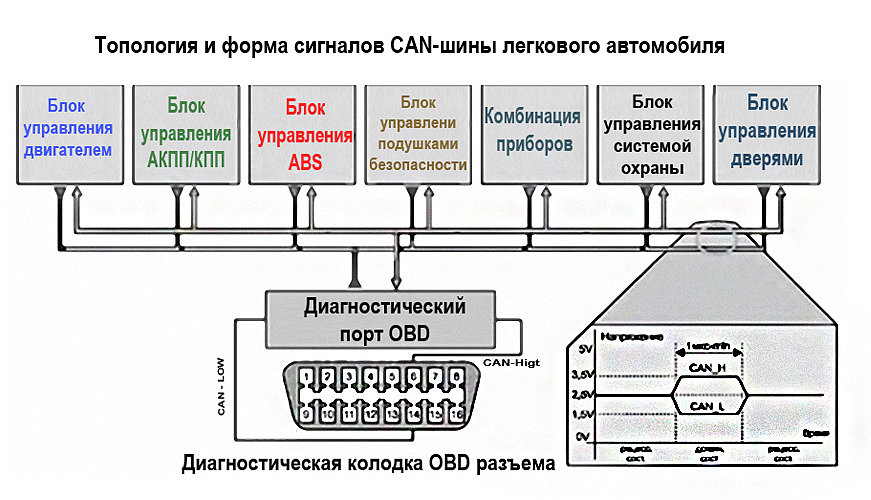
На рис. 1 показана топология и форма сигналов CAN-шины легкового автомобиля.
При передаче информации какого-либо из блоков управления сигналы усиливаются приемо-передатчиком (трансивером) до необходимого уровня.
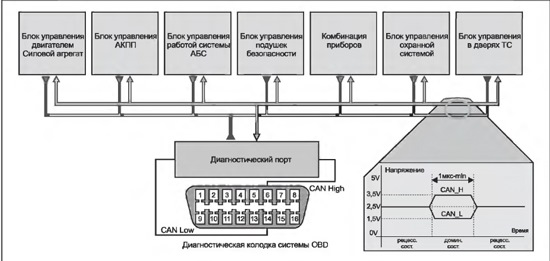
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN. Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов. Так, например, сопротивление блоков управления, подключенных к CAN-шине силового агрегата, в среднем составляет 68 Ом, а системы «Комфорт» и информационно-командной системы — от 2,0 до 3,5 кОм.
Следует учесть, что при выключении питания происходит отключение нагрузочных сопротивлений модулей, подключенных к CAN-шине.
Источник: www.drive2.ru
Разбираемся как работает КАН-шина на примере учебной системы CANBASIC
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Одним из подобных источников, который, как нам показалось, вполне подходящим образом иллюстрирует принципы работы CAN-шины, стал видеоролик-презентация учебного продукта CANBASIC компании Igendi Engineering (http://canbasic.com).
Также можете прочитать вторую нашу переводную статью Введение в CAN.
Добро пожаловать на презентацию нового продукта CANBASIC, учебной системы (платы), посвященной вопросу функционирования шины КАН (CAN).
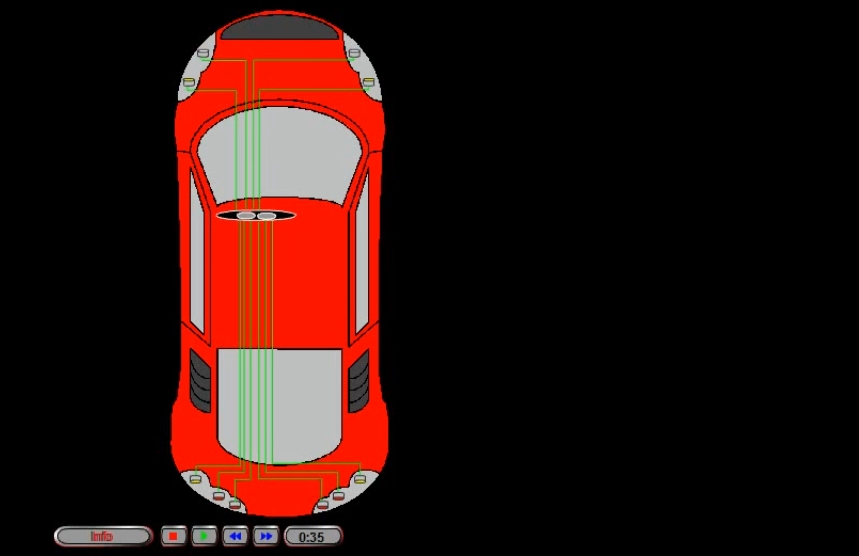
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.

Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.
Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.
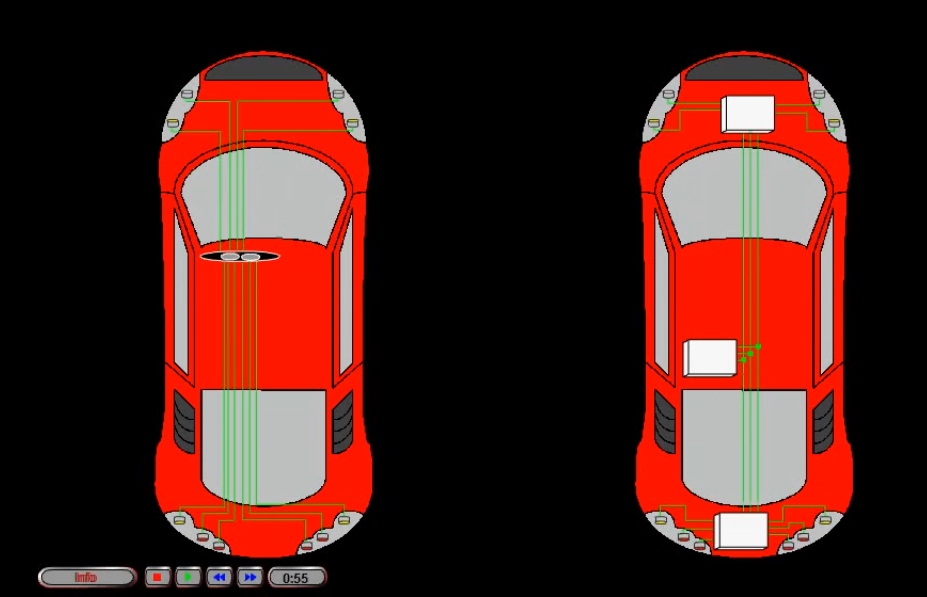
Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC
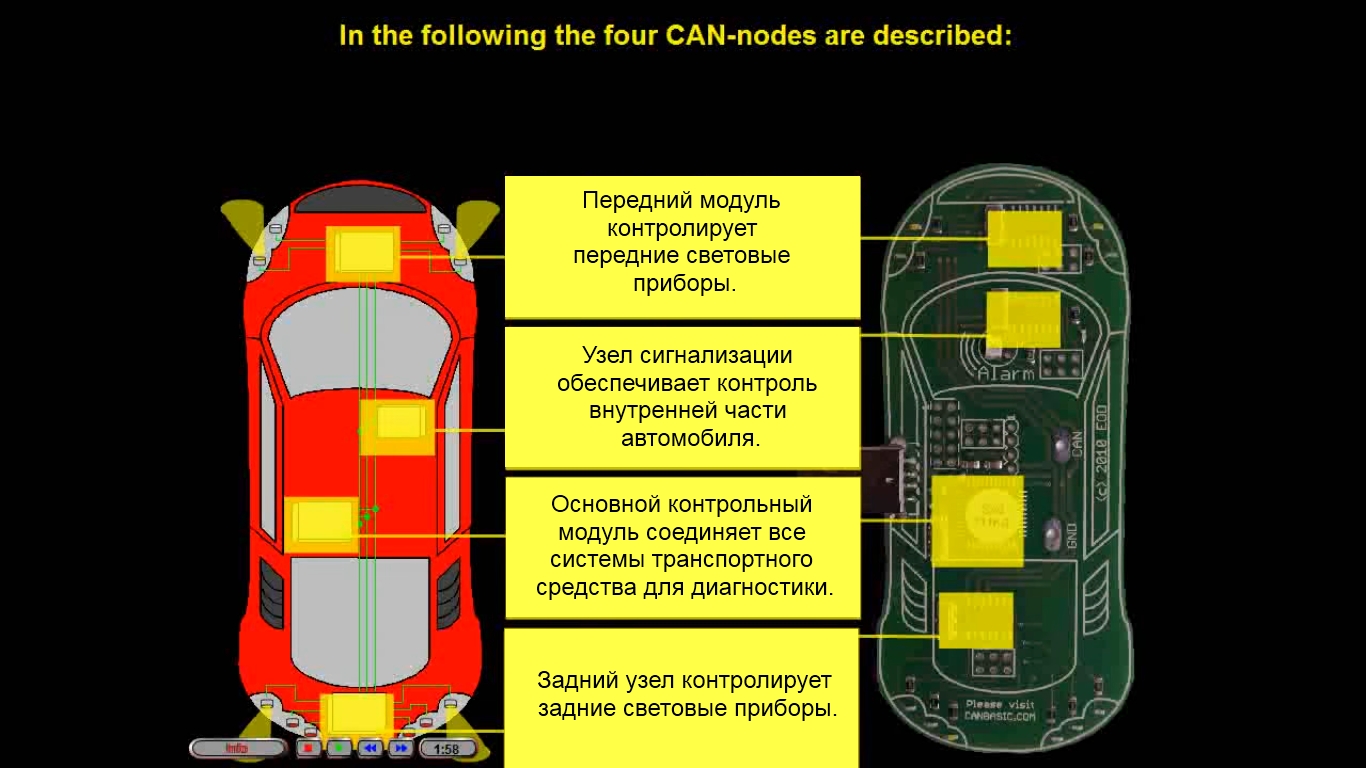
В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
На тренировочной доске CANBASIC вы можете увидеть маршрутизацию (расположение) трех сигналов: «Питание», «CAN-Hi» и «земли», соединяющихся в контрольном модуле.
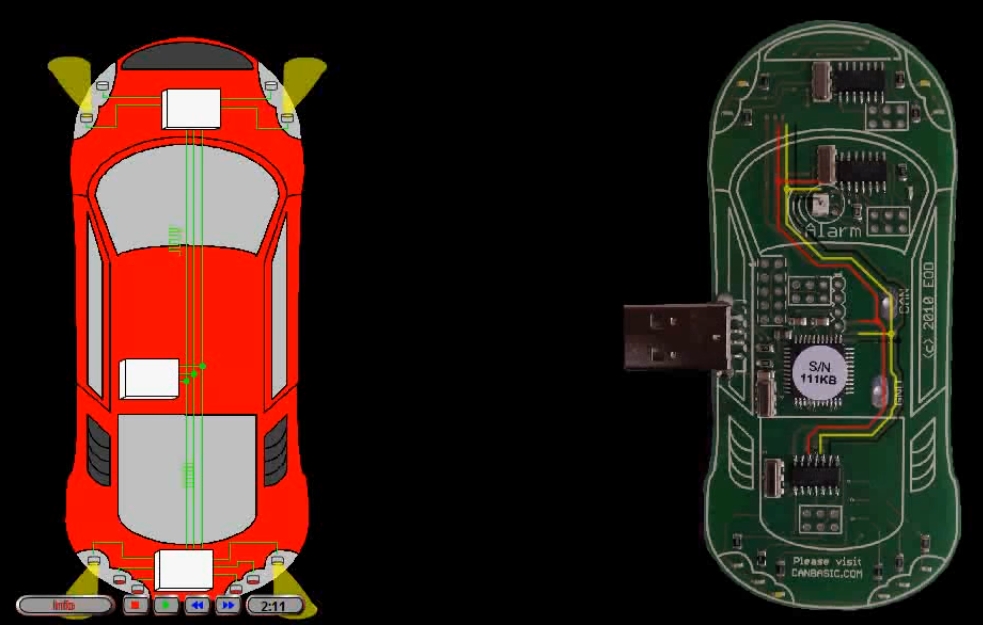
В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.
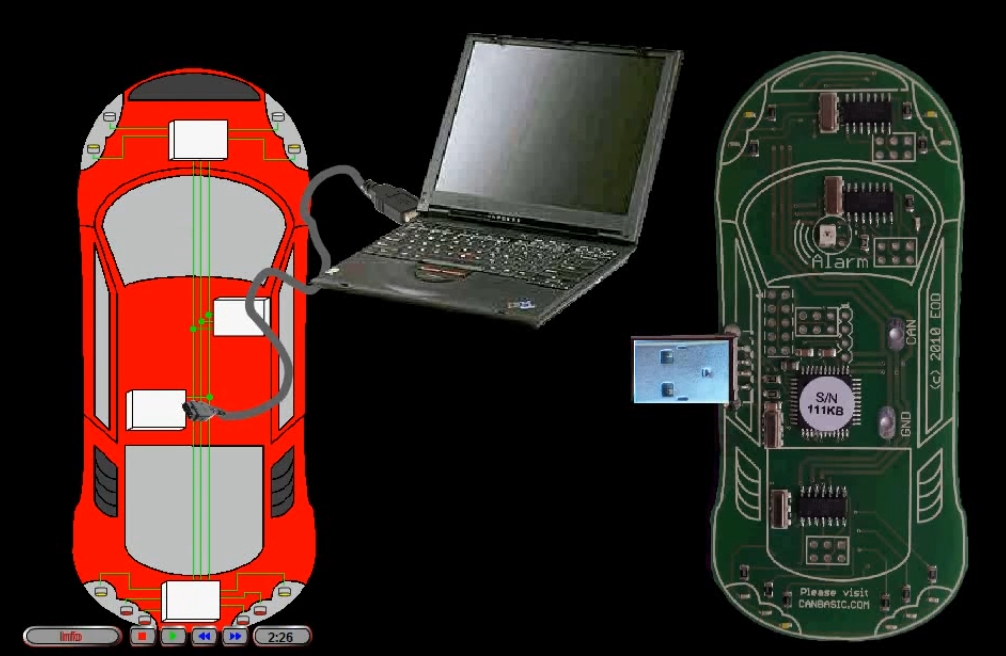
Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.

Провода шины используются для передачи множества данных. Как это работает ?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.
Человек с лампой, передатчик, хочет отправить какую-то информацию человеку с телескопом, получателю (приемнику). Он хочет передать данные.

Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.
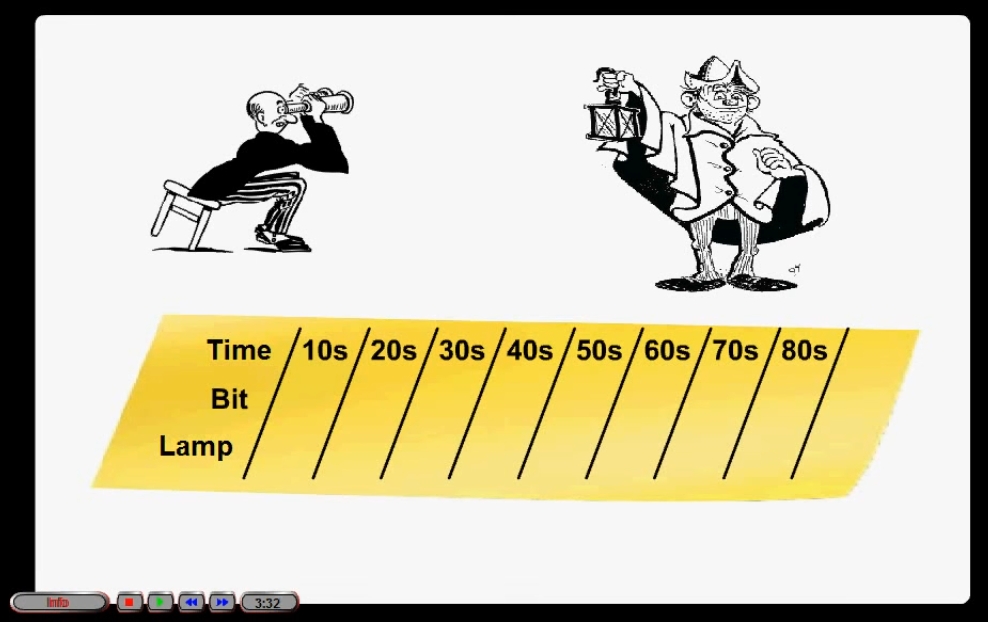
Это выглядит так:


Спустя 80 секунд:
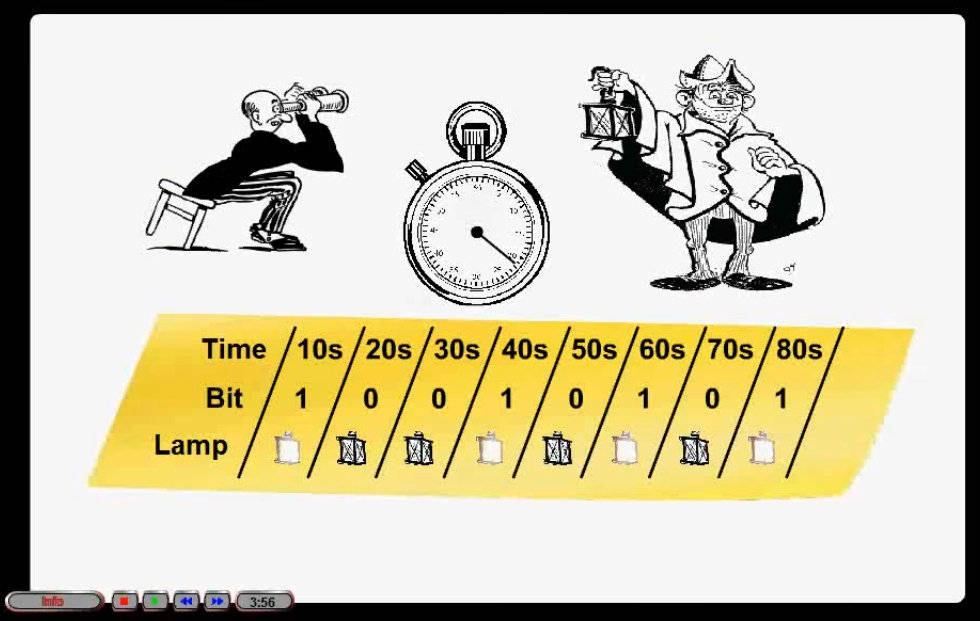
Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.
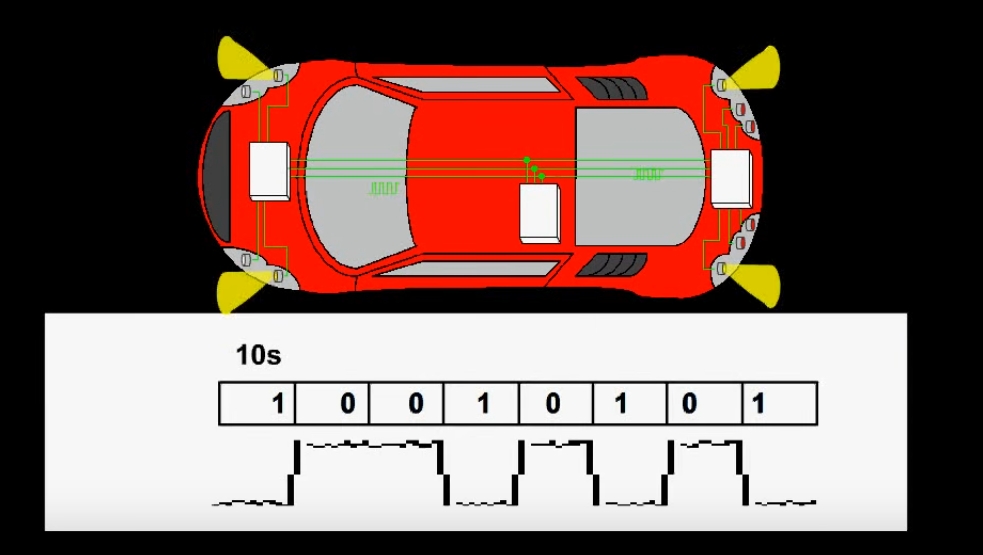
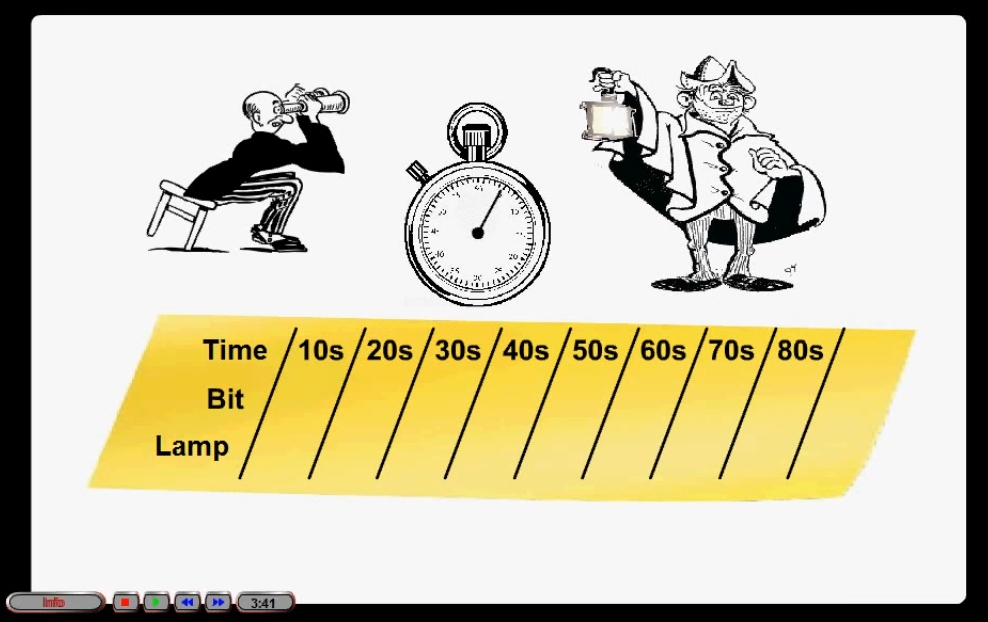
Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.

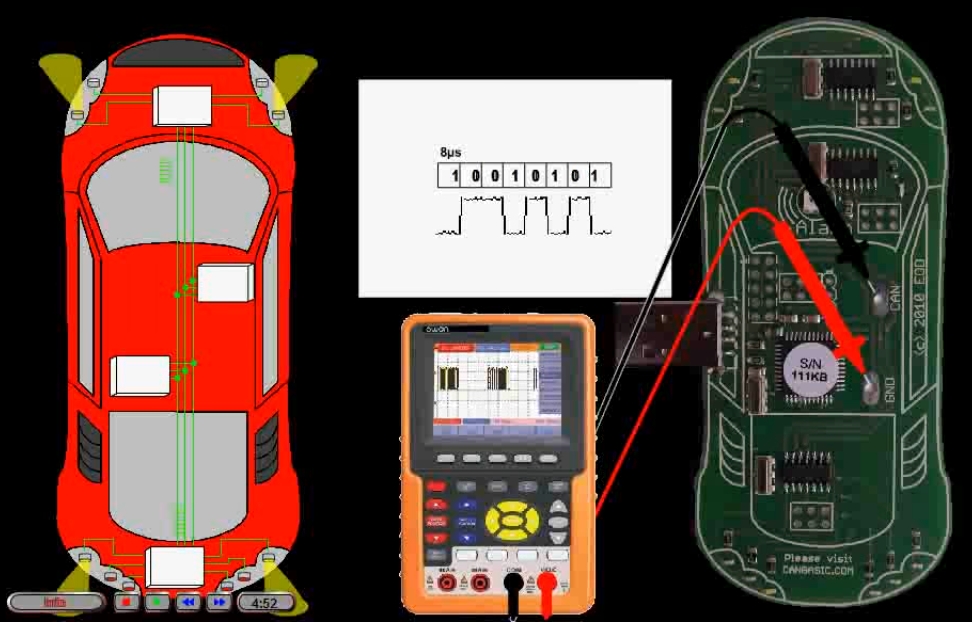
Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.
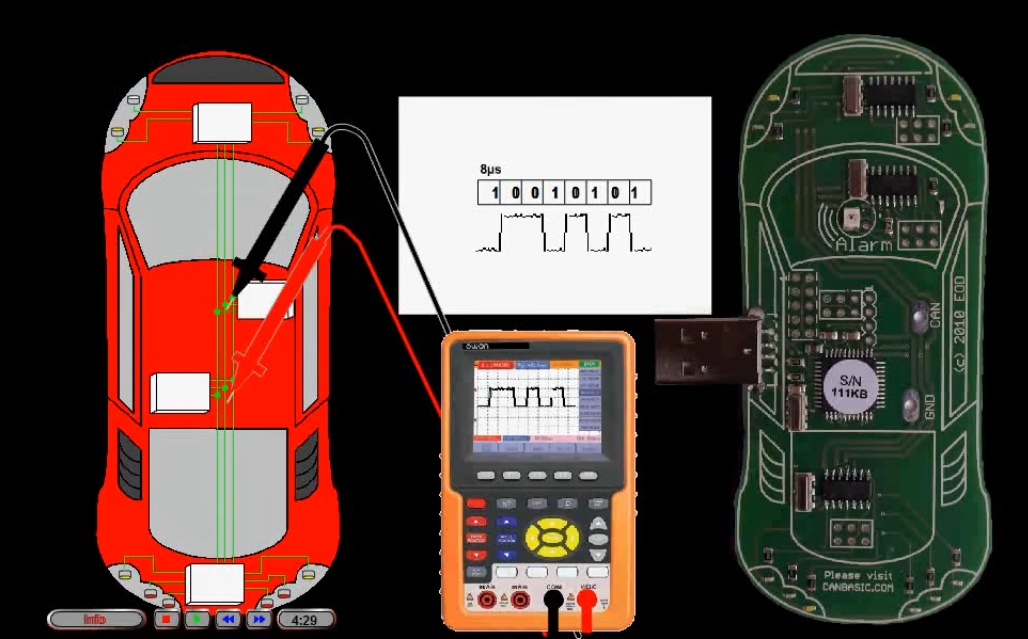
Чтобы показать полное CAN-сообщение разрешение осциллографа уменьшается.
В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
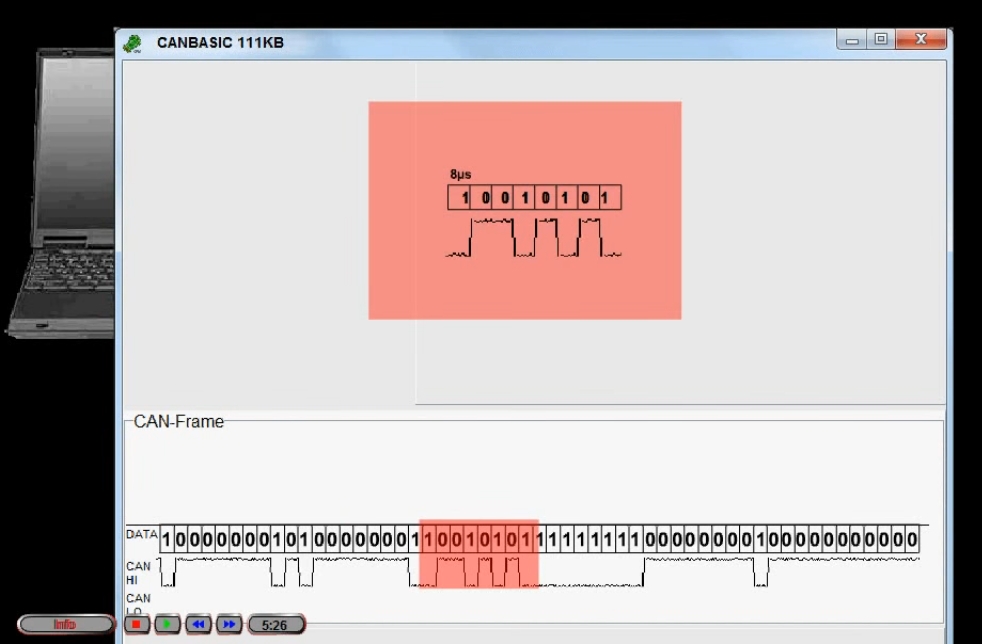
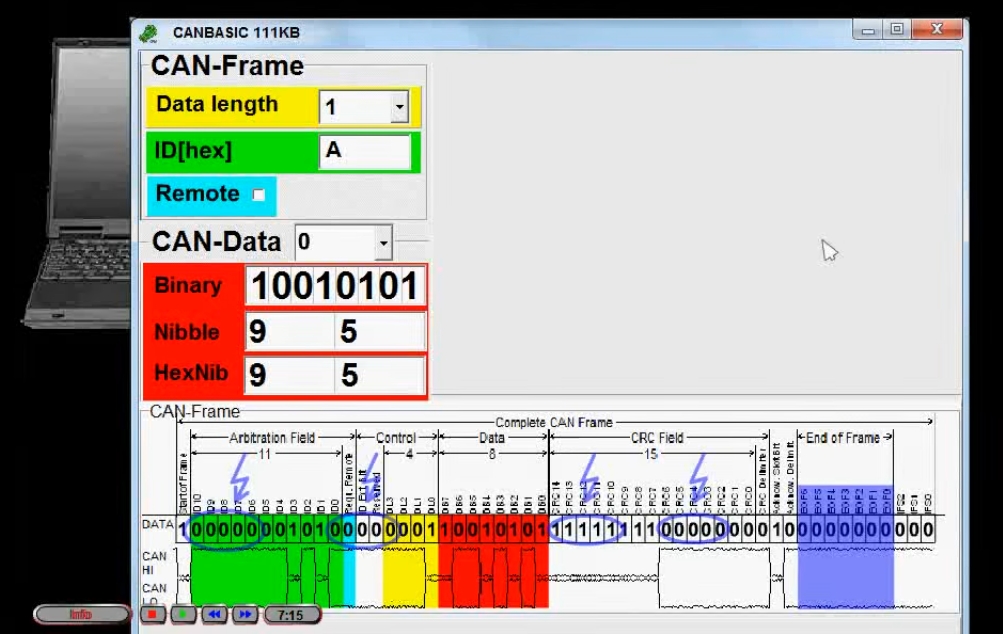
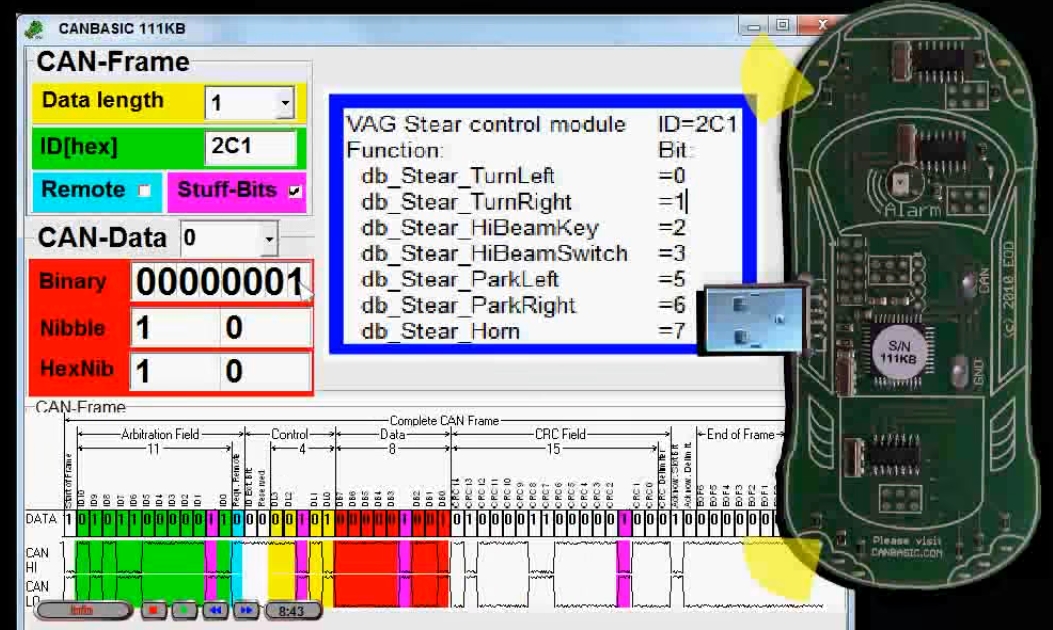
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
Чтобы объяснить другие части CAN-сообщения мы раскрашиваем CAN-кадр и прикрепляем на него подписи с описанием.
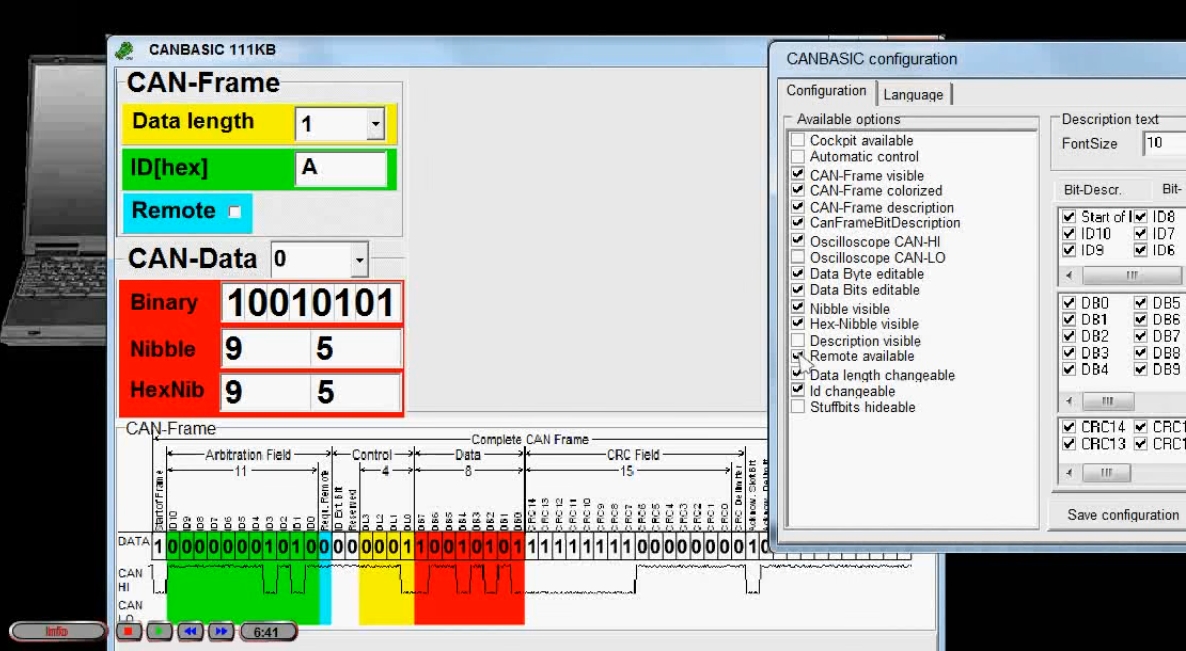
Каждая раскрашенная часть CAN-сообщения соответствует полю ввода того же цвета. Область, отмеченная красным, содержит информацию о пользовательских данных, которая может быть задана в формате битов, полубайтов или шестнадцатиричном формате.
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
Синяя область позволяет задать CAN-сообщение для удаленного запроса. Это означает, что будет ожидаться ответ от другого CAN-узла. (Разработчики системы сами рекомендуют не пользоваться удаленными запросами по ряду причин приводящих к глюкам системы, но об этом будет другая статья.)
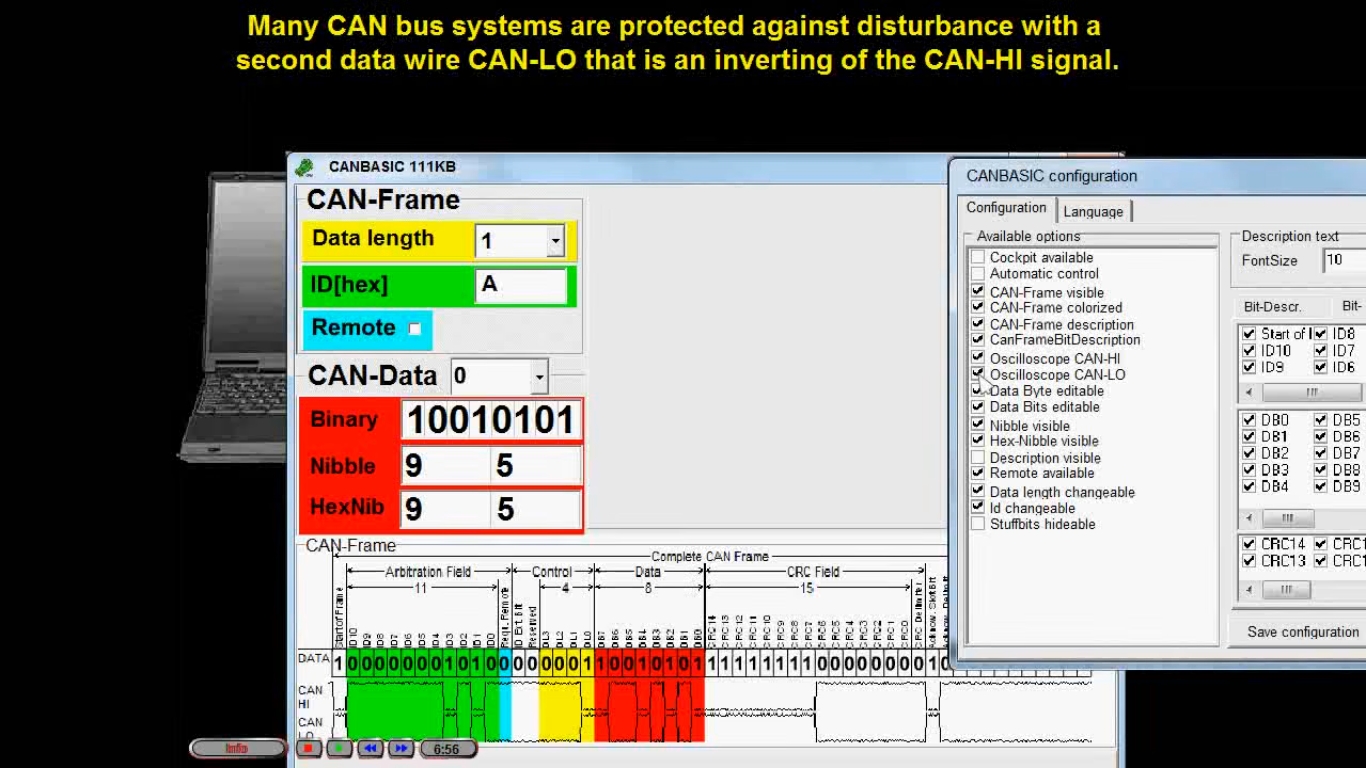
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).
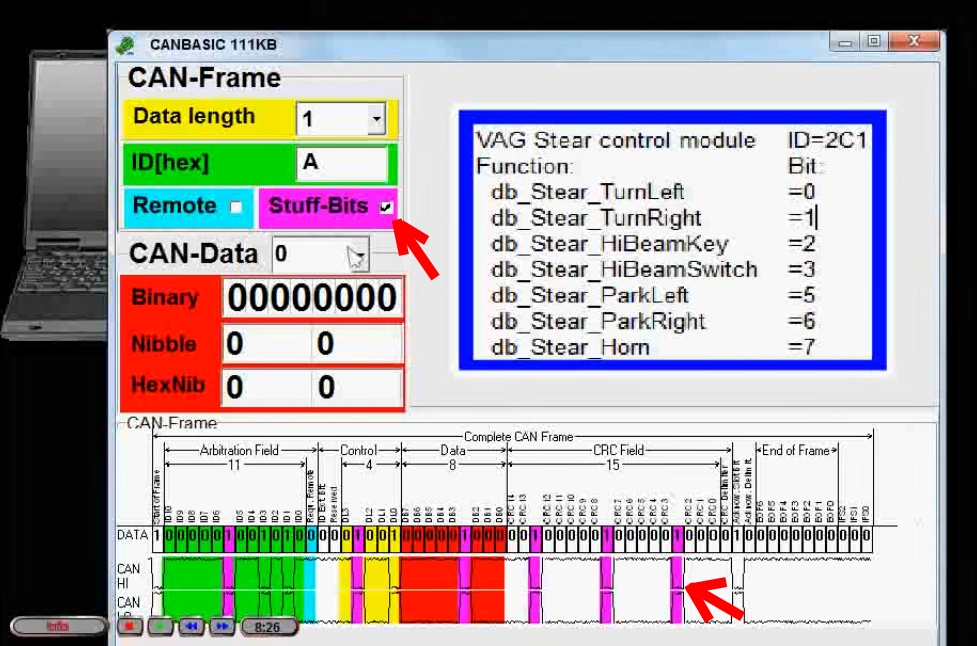
Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.
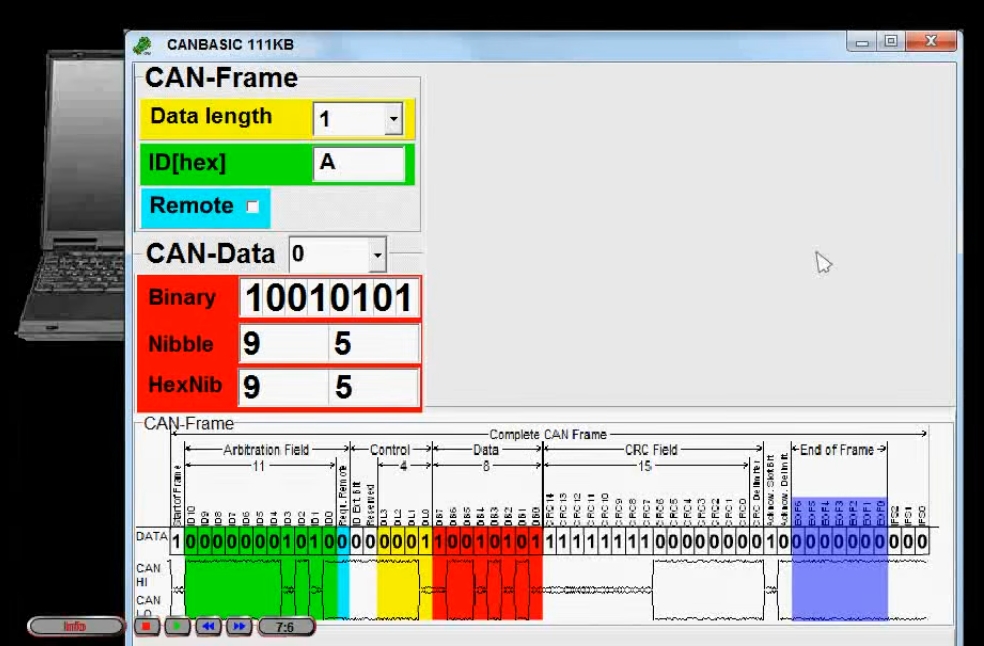
Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.
Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.
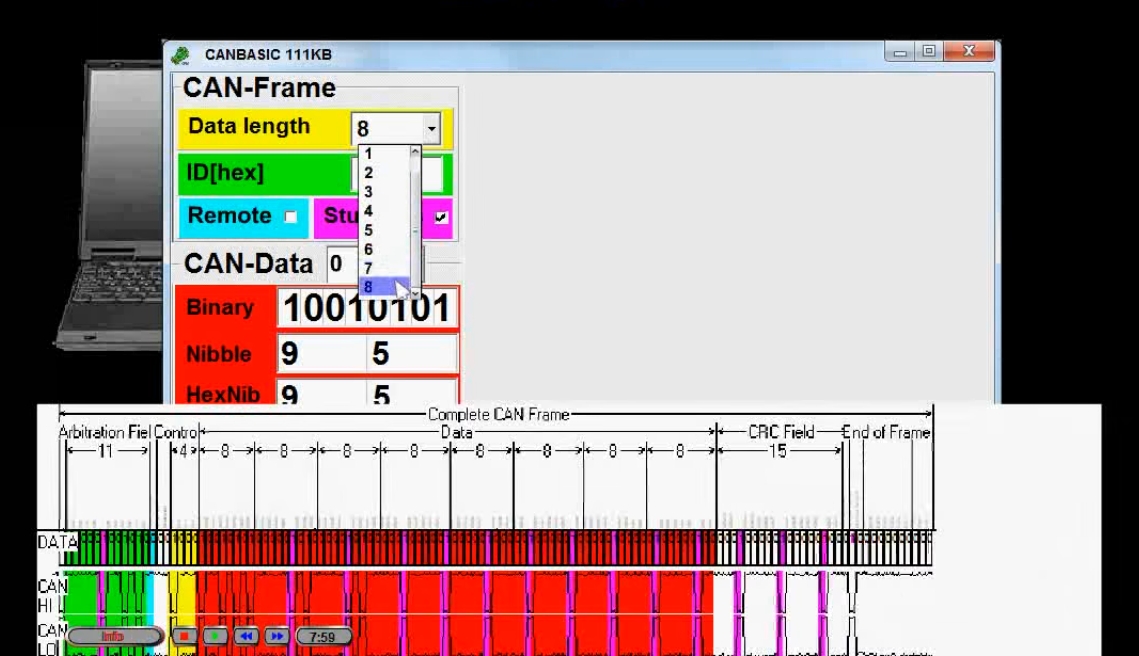
С помощью полей ввода могут быть заданы все данные КАН-кадра и поэтому каждое КАН-сообщение может быть отправлено.
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.
Текст описания показывает, что сигнал поворота будет управляться с помощью идентификатора «2С1» и бит данных 0 и 1. Все биты данных сбрасываются на 0.
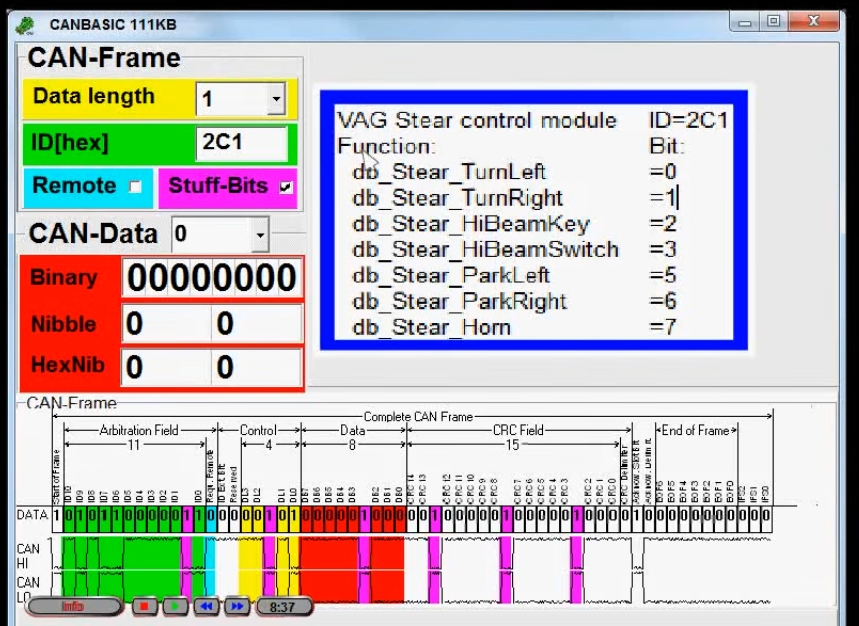
Идентификатор установлен в значение «»2С1». Для активации сигнала поворотов бит данных должен быть установлен с 0 на 1.
В режиме «в салоне» вы можете управлять всем модулем с помощью простых щелчков мыши. Данные CAN устанавливаются автоматически в соответствии с желаемым действием.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.

С отключением ближнего света противотуманные фары также отключаются. Логика управления световой системой CANBASIC соответствует автомобилям марки Volkswagen. Особенности зажигания и «возвращения домой» также включены.
С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.
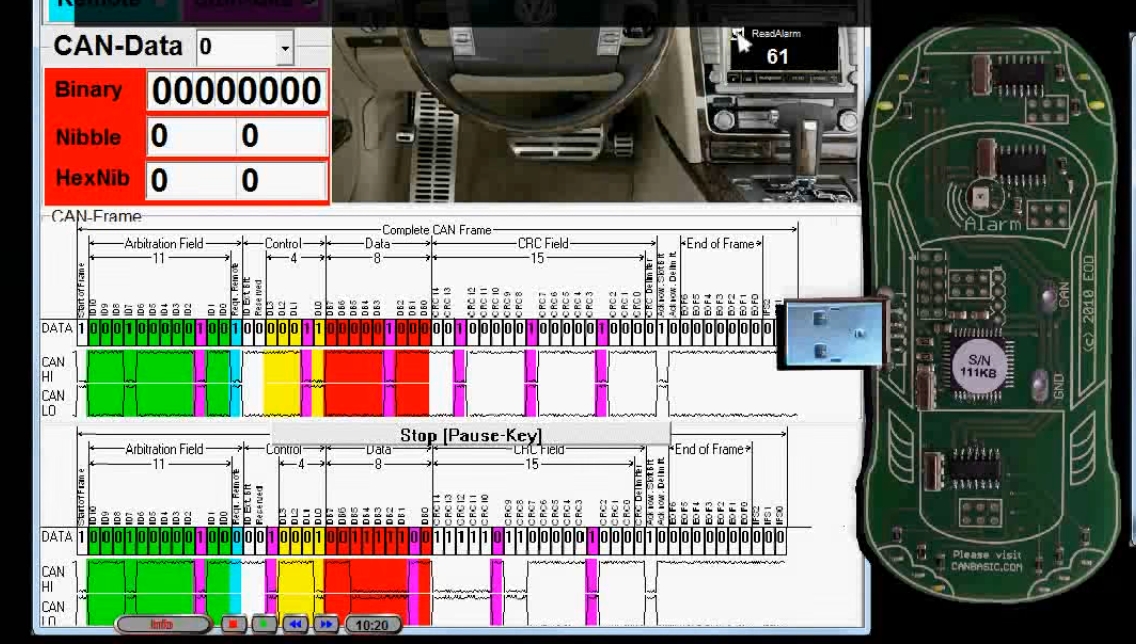
Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.

Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.
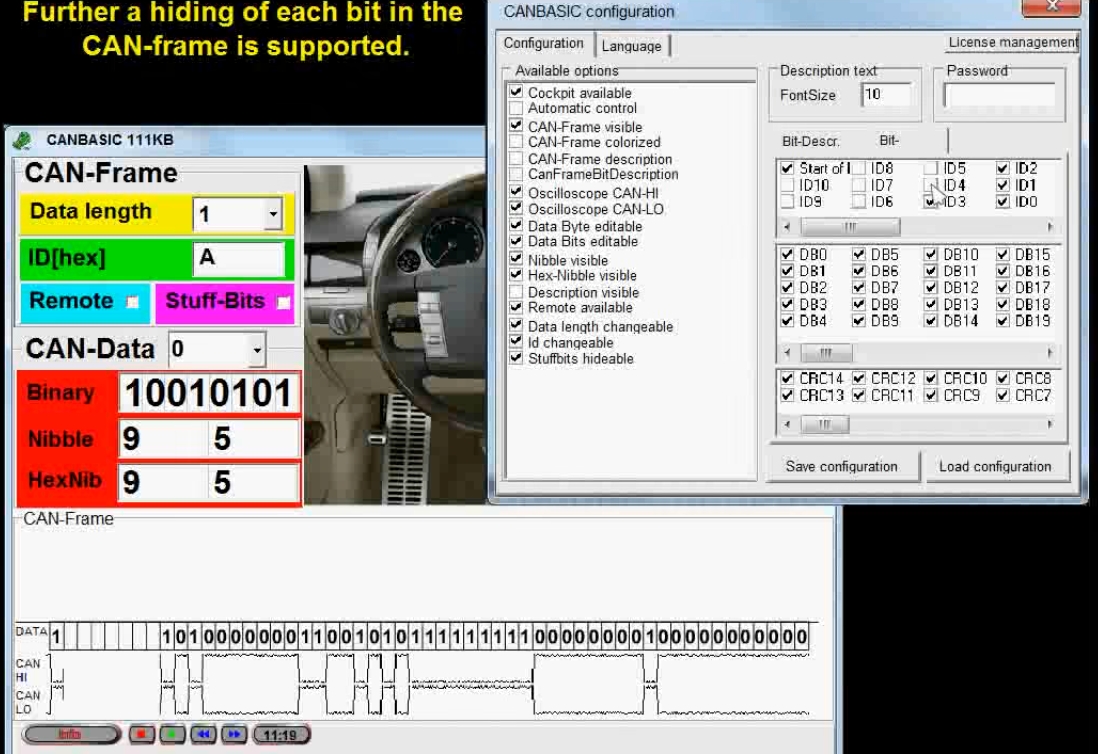
Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.
Источник: www.beworks.ru
Принцип работы и диагностика CAN-шины в автомобиле
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.

Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:

Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:

Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.

«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.

Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.

Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.

Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Источник: avtocity365.ru
Как работает CAN-шина и для чего она нужна в автомобиле?
Сегодня автомобиль, представляет из себя, не просто средство на колесах с двигателем и аналоговыми релюхами, которые было при поломке с легкостью заменить не только специалиста, но и мало-мальски грамотному человеку. Автомобиль сегодня представляет из себя целый компьютер да и еще в добавок, передвигающийся на колесах.
И даже грамотный человек в сегодняшнем авто уже не сможет сам разобраться с этими системами электроники и программаторами работающими во благо передвижения автомобиля, а все работы по ремонту и исправностей каких-либо деталей, должны выполнять профессионалы и именно они, а не кто-то другой. И если вам понадобилось до оснастить свой автомобиль каким-либо дополнительным оборудованием, то доверить своего железно-электронного коня рекомендуем спецам и людям любящим свое дело.
 Что такое автомобильная CAN-shina и для чего она нужна?
Что такое автомобильная CAN-shina и для чего она нужна?
Очень частенько, при обсуждении с клиентами вопросов дополнительного оборудования и систем охраны в автомобили приходится проводить целые лекции на предмет почему той или иной монтаж дополнительного оборудования будет проводиться по времени больше суток, а иногда и несколько, конечно не обходится, при разговоре и без умных узконаправленных значений каких либо элементов автомобильной электроники типа CAN шина, RGB сигналы и пр… интересные штучки, что вводит незнающего человека в ступор, да я и сам когда-то, так же слушал про это все.))
Что такое автомобильная CAN-shina и для чего она нужна?
За последнее время, число различных опций в автомобиле выросло в разы. Увеличение опций произошло благодаря гонке за улучшения качества и пожеланиям клиентов и их потребностям не просто передвигаться, а передвигаться с комфортом, также еще законодательство увеличило требования безопасности окружающей среды. И при всех дополнительных оснащений потребление электроэнергии автомобиля увеличилось в двое.
Но можно было-бы оставить все без изменений и если раньше вопрос стоял о надежности, то сегодня еще к этому всему прибавилась масса различных опций электронного характера. И перед инженерами встает вопрос о приспособлении автомобиля к научно-техническому прогрессу не внося колоссальных изменений в конструкции но при этом учитывая все тонкости безопасности и эксплуатации.
Учитывая и стандартно применяющаяся схема однопроводного подключения к массе аккумулятора «GND (минус)», а вторым подключение является подключение массы к кузову, а плюсовой провод тянется по всему автомобилю и питается напрямую от генератора, и когда общая длина проводки в автомобиле достигла с километр и весом более центнера, выяснилось, что однопроводная схема хороша, но не во всем, как думали об этом прежде.
 В Детройте на конференции в 1983 году компанией «Bosch» было официально анонсировано устройство под названием CAN (от англ. Controller Area Network) Сеть пространства датчиков.
В Детройте на конференции в 1983 году компанией «Bosch» было официально анонсировано устройство под названием CAN (от англ. Controller Area Network) Сеть пространства датчиков.
Для уменьшения проводов в автомобиле и увеличения скорости передачи данных появилась CAN-шина (от англ. Controller Area Network) «сеть пространства датчиков», которую применяют с сохранением минуса на кузове автомобиля и для уменьшения огромных килограммовых жгутов в автомобиле. Эта разработка велась крупной компанией BOSCH с 1970 года, пройдя международную сертификацию «ISO» в 1993 году вышла на массовое производство примерно с 2011 года.
Для чего все таки нужна CAN-шина, принципы ее работы?
Современный автомобиль обладает современной бортовой электроникой с огромным количеством управляюще-исполнительных модулей, к ним можно отнести всевозможные контроллеры, датчики и пр…, а для обмена информацией требовалась надежная и быстрая передача данных, для общения между приборами.
Современная CAN-шина обеспечивает дуплексную систему для одновременной приемо-передачи цифровой информации, обрабатывая ее одним блоком, где скорость передачи данных играет немаловажную роль. Реализация кан шины представляет с собой витую пару и позволила в разы уменьшить электромагнитные поля, которые возникают при работе генератора и других немаловажных систем автомобиля.
Обычно проводка CAN-шины оранжевых цветов, отличаясь друг от друга различными цветными полосками (CAN-Higt – черная, а CAN-Low – оранжево-серая).
С приходом CAN шины и началом ее применения, схема автомобильных проводников высвободилась от определенного количества проводников, которые обеспечивали связь контроллера управления между диагностическим разъемом, двигателем, мультимедией (навигационные системы на ОС Android), системой защиты автомобиля и пр…, по протоколу KWP 2000.
 Протокол управления автомобилем при помощи CAN шины KWP 2000
Протокол управления автомобилем при помощи CAN шины KWP 2000
Скорость обработки данных по CAN-шине может быть до 1 Мбит/с, а скорость обработки информации между жизненно важными системами в автомобиле, например – система безопасности торможения ABS, трансмиссия двигателя составляет 500 кбит/с. Помимо основных систем в автомобиле присутствует система комплектации в которую входят – подушки безопасности, мультимедия для автомобиля, блоки управления в дверях авто и пр.. может составить 100 кбит/с.
При обмене информацией между какими-либо блоками управления, и при помощи трансивера сигналы приемо-передачи информации усиливаются до необходимого уровня.
 Топология и формы сигналов CAN-шины
Топология и формы сигналов CAN-шины
Каждый блок подключенный к CAN-шине обладает определенным входным сопротивлением, в следствии чего, образуется нагрузка СAN модуля. Нагрузка на центральную CAN шине зависит от одновременного подключения и использования исполнительных механизмов и электронных блоков управления автомобилем и различными датчиками, например – сопротивление силового агрегата подключенного к CAN-шине составляет в среднем 68 Ом, информационно-командные системы «комплектации КОМФОРТ» от 2,0 до 3,5 кОм. В момент обесточивания всей системы отключается и нагрузочное сопротивление модулей работающих по CAN-шине.
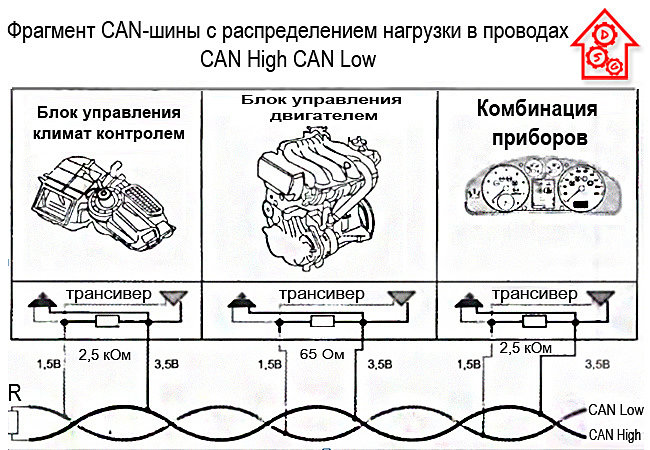 Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low.
Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low.
Системные, автомобильные блоки управления, обладают помимо различных нагрузочных сопротивлений еще и скоростью передачи данных, что может привести к препятствию в момент обработки разнохарактерных импульсов.
Для решения технической проблемы разнохарактерных импульсов применяется для связи между шинами межсетевой преобразователь.
Преобразователь – это, так называемый межсетевой-интерфейс, в автомобиле применяется в блоке управления или отдельно стоящим блоком и пр… Преобразовывающий интерфейс применяется для различного ввода / вывода информации диагностического разъема OBD, по определенному проводу выведенному к диагностическому разъему и соединяющий центральный блок управления OBD разъемом при помощи CAN-шины.
OBD – это унифицированный диагностический разъем с массой удобств и преимуществ для сканирования автомобиля на предмет ошибок и диагностики.
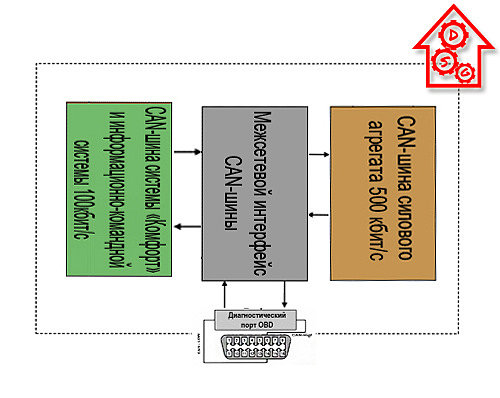 Блок-схема межсетевого CAN интерфейса.
Блок-схема межсетевого CAN интерфейса.
Как показано на картинке, общение в автомобиле электронных блоков CAN шины происходят при помощи разных блоков, но делающие одно дело, силовой агрегат CAN-шины, информационной-командной системы и системы Комфорт, в зависимости от марки автомобиля и по своему составу, блоки могут отличаться, но суть идее остается неизменной.
Диагностика автомобиля на предмет неисправностей производится посредством подключения специализированного диагностического оборудования с необходимым программным обеспечением, так называемого анализатора CAN-шины или при помощи осциллографа (с анализатором шины CHN) и мультиметра (цифрового).
Проверку на предмет работы CAN – шины начинаются с измерения между проводами CAN сопротивления. Но необходимо помнить о том, что CAN-блок шины информационно-командной системы и системой «КОМФОРТ» постоянно находятся под напряжением, что не скажешь про силовой агрегат. Для этого в момент проверки рекомендуется отсоединить аккумулятор, можно обойтись одной из 2 клемм (плюсом или минусом).
В основном все неисправности CAN-шины заключаются в обрыве или замыкании линий, нагрузочных резисторов, нарушением логики работы или понижением уровня сигналов. В случае с нарушением логики поиск и обнаружение проблемы можно только при помощи анализатора CAN – шины.
Источник: disgear.ru
CAN-шина
Электрические цепи автомобилей усложнялись и разрастались год от года. Первые автомобили обходились без генератора и аккумулятора – зажигание работало от магнето, а фары были ацетиленовые.
К середине 70-х годов в жгуты увязывались уже сотни метров электрических проводов, автомобили по оснащённости электрикой, соперничали с легкомоторной авиацией.
Идея упрощения электропроводки лежала на поверхности – хорошо бы проложить в автомобиле всего один провод, нанизать на него потребителей и возле каждого поставить некое управляющее устройство. Тогда по этому проводу можно было бы пустить и энергию для потребителей (лампочек, датчиков, исполнительных устройств) и управляющие сигналы.
К началу 90-х развитие цифровых технологий позволило приступить к осуществлению этой идеи — компаниями BOSCH и INTEL был разработан сетевой интерфейс CAN (Controller Area Network) для создания бортовых мультипроцессорных систем реального времени. В электронике проводную систему, по которой передаются данные, принято называть “шиной”.
Если данные передаются по двум проводам (т.н. “витая пара”) последовательно, импульс за импульсом – это будет последовательная шина (serial bus), если данные передаются по жгуту из нескольких проводов одновременно – это будет параллельная шина (parallel bus).
И хотя параллельная шина работает быстрее, для упрощения электропроводки автомобиля она не подходит – она её как раз только усложнит. Витая пара последовательной шины способна передавать до 1Мбит/сек, чего вполне достаточно.
Правила, по которым отдельные блоки обмениваются информацией, в электронике называются протоколом . Протокол позволяет посылать отдельным блокам отдельные команды, опрашивать каждый блок в отдельности или всех сразу. Кроме адресного обращения к устройствам, протокол предусматривает и возможность задания приоритетов самим командам. Например, команда на управление двигателем будет иметь приоритет перед командой на управление кондиционером.
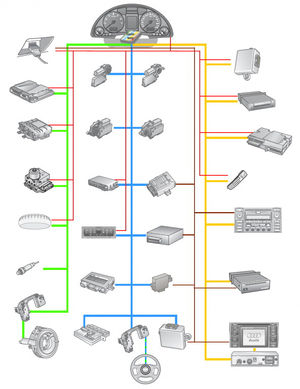
Развитие и миниатюризация электроники позволяют теперь выпускать недорогие модули управления и связи, которые в автомобиле можно соединять в виде звезды, кольца или цепи.
Обмен информацией идет в обоих направлениях, т.е. можно не только включить например лампочку заднего хода, но и получить информацию светит ли она.
Получая информацию от различных устройств система управления двигателем выберет оптимальный режим, система кондиционирования включит отопление или охлаждение, система управления стеклоочистителем взмахнет щетками и т.п.
Значительно упрощается и система диагностики двигателя и всего автомобиля в целом.
И хотя главная мечта электрика – всего два провода по всей машине – ещё не сбылась, CAN шина значительно упростила электропроводку автомобиля и повысила общую надежность всей системы.
Итак, CAN-шина — это система цифровой связи и управления электрическими устройствами автомобиля, позволяющая собирать данные от всех устройств, обмениваться информацией между ними, управлять ими. Информация о состоянии устройств и командные (управляющие) сигналы для них передаются в цифровой форме по специальному протоколу двумя проводами, т.н. «витая пара». Кроме того к каждому устройству подается и питание от бортовой электросети, но в отличии от обычной проводки – все потребители соединены параллельно, т.к. нет необходимости вести от каждого выключателя до каждой лампочки свой провод. Это значительно упрощает монтаж, снижает число проводов в жгутах и повышает надёжность всей электросистемы.
Подробнее о CAN шине можно почитать «здесь»
Источник: wiki.zr.ru